
Related Manuals for Danaher Motion B8962




Summary of Contents for Danaher Motion B8962
- Page 1 B8961 and B8962 Brushless Servo Smart Drives This manual covers the following IDC Products: B8961-1 axis Brushless Servo Operator’s Manual Smart Drive B8962-2 axis Brushless Servo Smart Drive P/N PCW-4744, Rev 1.9...
-
Page 2: Table Of Contents
Table of Contents Table of Contents PRODUCT AND MANUAL OVERVIEW ..............1 SHIPPING CONTENTS........................2 QUICK START......................3 KEYPAD OPERATION ..................7 KEYPAD FEATURES ..........................7 Keypad Har dware Features ..........................9 Dipswitches ..........................9 Contrast ..........................9 Remote Mounting .........................9 KEY PAD PROGRAMMING MENU STRUCTURE................10 RUN Menus ..............................PROG Running Programs....................11 Jogging the Motor ....................11... - Page 3 B8961 and B8962 User Manual Toggle Tuning Stimulus.......................46 Monitor Monitor Port ......................46 PROGRAMMING YOUR APPLICATION ............47 SMART DRIVE PROGRAMMING OVERVIEW .................47 CREATING OR EDITING PROGRAMS WITH THE KEYPAD ............47 COMMAND SUMMARY ........................48 VARIABLES AND ARITHMETIC .......................49 VARIABLES ............................49 LEGAL VERIABLE NAMES .......................49 BUILT-IN VARIABLES ........................50...
- Page 4 RPACK-1 and RP ACK-2 Mounting Installation .................. Remote Keypad Mounting ........................B8000 SMART DRIVE HARDWARE SPECIFICATIONS..............133 B8961 AND B8962 HARDWARE CONNECTIONS ................134 B8961 AND B8962 INPUT AND OUTPUT SCHEMATICS .............135 TROUBLE SHOOTING ..................137 SYMPTOMS AND SOLUTIONS .....................137 IDC PRODUCT SUPPORT ................139 FACTORY AUTHORIZED DISTRIBUTORS ..................139...
-
Page 5: Product And Manual Overview
IDC’s B8961 and B8962,one and two axis Smart Drives,combine a DSP based servo amplifier with a powerful,but easy to use,machine controller.We offer a single axis version (B8961) and a dual axis version (B8962).The B8962 has two axes of independently configurable amplifiers.Both products incorporate IDC’s 5 amp continuous,10 amp peak,120/230VAC,digital servo amplifier with a motion/machine controller in a single,compact package.Up to 24 digital I/O are... -
Page 6: Shipping Contents
If you cannot find the information that you need in this manual,please contact the Applications Department.(800) 227-1066. Shipping Contents 1. B8961 or B8962 Smart Drive control 2. 120 VAC power cable 3. Application Developer software cd-rom 4. Installed OPTO modules (optional) 5. -
Page 7: Quick Start
Axis One Motor Type keys to change the motor choice.If you have a B23:110 VAC B8962,use the ß and à arrows to change to axis two to verify the motor choice. 3. Once the proper motor and volta ge level has been selected,press ESC to save your choices. - Page 8 2. Press the ß or à key to jog (and á and â keys PROG JOG TEST to jog axis two on the B8962). 3. Change the Jog Speed by pressing High (F2) or Low (F1) and jog again. Run [TEST MOVE] Program Press ESC to return to the Main Display.
- Page 9 Chapter 2 - Quick Start Create and Run a Simple Program Press ESC to return to the Main Display. 1. Press EDIT. Press PROG (F1). Enter 1.(Edit program #1.) Press F2 & 2 & 1 & ENTER VE10 Press F1 & 2 & 1 & 0 & ENTER Press F2 &...
-
Page 10: Keypad Operation
Chapter 3 - Keypad Operation Keypad Operation This chapter is meant to familiarize a first time user with the basics of IDC’s keypad operation.IDC’s keypad functions fall into two categories. The keypad functions first as a programming and troubleshooting tool.Secondly, it functions as an operator interface.Operators can run programs,make menu choices,or be prompted to enter data via the keypad number keys. - Page 11 B8961 and B8962 User Manual Runs a Program, Jogs an axis,or accesses Test/Debugging functions like Program Trace mode,and amplifier Enable/Disable/Reset. EDIT Edits setup parameters,programs,tuning (servos only),and resets position counter. Also accesses program listing and teach mode. (Teach mode will be implemented in a future software r evision.)
-
Page 12: Keypad Hardware Features
Chapter 3 - Keypad Operation Keypad Hardware Features Dipswitches A bank of four dipswitches on the back of the keypad provide a way to lock operators out of various keypad access levels.See the chart below for switch assignments.If access to a menu level is denied,pressing that key will have no effect. -
Page 13: Key Pad Programming Menu Structure
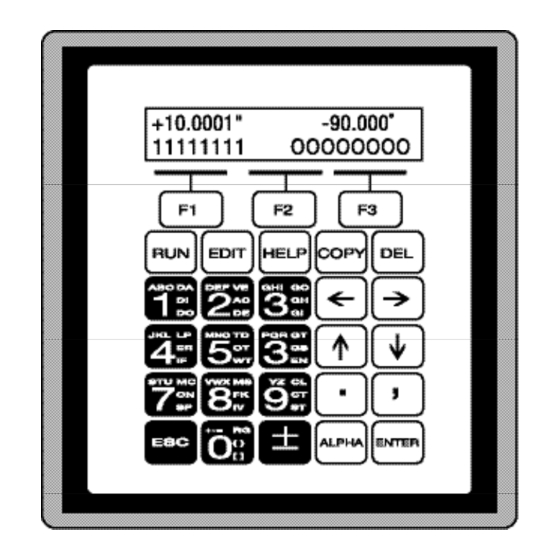
B8961 and B8962 User Manual Key Pad Programming Menu Structure Most operations from the Keypad are menu-driven.A menu consists of a title bar on the top display line and as many as three options (or sub-menus) at a time on the bottom display line.Each option is positioned over one of the function keys. -
Page 14: Prog Running Programs
2. JOG(F2) 3. ß and à keys to move axis 1 á and â keys to move axis 2 on a B8962. Note:The á and â keys will also jog Axis 1 on a single axis unit. Change between Low and High speeds with the F1 and F2 keys. Jog speeds and accelerations can be changed in the JOG \ SETUP menu. -
Page 15: Test Test And Debugging Functions
SHUTDN Selecting SHUTDN (shut down) allows you to ß Drive 1 Disabled à enable,disable or reset axis 1 or axis 2 (B8962). ENABLE DISABLE RESET When a drive is disabled,the amplifier is off and your motor has no power.The shaft can be manually rotat- ed relatively easily. -
Page 16: Edit Menus
Chapter 3 - Keypad Operation RS232 Serial Communications ---- Test Connection----- > TEXT > RS232 TRANSMIT RECEIVE This feature allows for testing of the terminal serial communications port through the keypad. Testing Serial Transmission: Test String ‘ABC123’ 1. From the Test Connection menu press the F1 key to Transmitting.. -
Page 17: Setup System Set-Up Menu
B8961 and B8962 User Manual SETUP System Set-up Menu The following table shows the structure within the SETUP menu. For complete descriptions of each system parameter in the SETUP sub-menu,see Configuring Your System . Sub- Set-up Description of Set-up Parameters... -
Page 18: Pos Reset Current Position To Zero
Chapter 3 - Keypad Operation Reset Current Position to Zero POS is a quick way to reset the motor’s current Reset Position? position to (absolute) zero,which can be a helpful setup and debugging tool. Press: 1. EDIT \ POS 2. YES (F1) or NO (F3) LIST List User Memory Usage LIST provides a way to view your program memory usage.Your IDC Smart Drive... -
Page 19: Help Menus
B8961 and B8962 User Manual TEACH Teach Move Positions Within a Program To be implemented in a future version of software. HELP Menus Whenever you have a question using the keypad,pressing HELP will display a help HELP message related to the menu you are currently in.Help messages are often several lines,which you can scroll through using the á... -
Page 20: Del Menu
Chapter 3 - Keypad Operation TO-FROM PAD Copy to-from Keypad -----------COPY---------- The COPY TO-FROM feature has been implemented PROG TO PAD FROM which allows user setup and programs to be down- loaded to and from the keypad.A special keypad cable (PCS-5004) provides a +5V power supply and a 9 pin D style connector for communications with Application Developer™.COPY TO-FROM requires SmartDrive version v6.00 or higher and keypad firmware v2.60 or higher. -
Page 21: Configuring Your System
Following all the SETUP steps will insure that no critical parameters are overlooked. The task of configuring your B8961 or B8962 Smart Drive system to a specific application consists of customizing a number of software parameters to match the mechanics of the system.These parameters include distance,acceleration and velocity scaling as well as I/O configuration.Other than plugging in the... -
Page 22: Setup Menu
B8961 and B8962 User Manual SETUP Menu - - - á SETUP â - - - Pressing the EDIT key followed by the SETUP MOTOR MECH function key reveals three menus. Pressing â reveals a second and a third set of menus. - Page 23 [MR] Default:B Motors = 8,000,H motors = 8,000,BN Motors = 4,000. IDC’s B8961 and B8962 Smart Drives allow you to set a different drive input resolution than the actual resolution encoder.This option specifies the input resolution for each axis of your digital servo smart drive,in counts per motor revolution.This is a very useful feature when retrofitting microstepping systems.
-
Page 24: Enc Encoder Configuration
SERVO CLOSED LOOP This option sets the encoder mode for each axis. The B8961 and B8962 servo position loops are closed by the DSP in the amplifier, freeing up the motion control board to do other processing.Therefore, you can run the servo in either “open loop”or “servo closed loop”modes.This allows you to... - Page 25 Chapter 4 - Configuring Your System NOTE: EDIT > SETUP > ENC > INRANGE > WINDOW and the IR serial command have an alternate functionality with servo SmartDrive systems. See the B8961/2 manual for more details. - Axis One PMGain - EDIT >...
-
Page 26: Mech Mechanical Configuration
B8961 and B8962 User Manual Specifying the wrong encoder resolution will prevent the Smart Drive from properly communicating the motor and could damage it,as well as cause unstable system behavior. For this reason,IDC fixes the encoder resolution for our servo motors.Consult the factory if your application requires using another motor or... - Page 27 Chapter 4 - Configuring Your System - Axis One Dist Units - EDIT SETUP MECH DIST ßá revs âà Distance Unit [DU] Default:Motor Revs DIST is used along with RATIO to select your distance units and unit label.All distance values specified in the system will be expressed in the units selected here. The relationship between motor revolutions,system mechanics,and the distance label chosen here is defined with the RATIO command defined below.
- Page 28 B8961 and B8962 User Manual Units Example - Lead Screw System • Desired distance units:inches • Lead Screw:4 revs/inch DIST = inch RATIO = 4 to 1 Units Example - Rotary Index Table • Desired distance units:1/8 of a revolution...
- Page 29 Chapter 4 - Configuring Your System EDIT SETUP MECH VMAX Maximum Velocity [MV] - - Axis One Max Vel. - ßá 50.0 inch/sec âà Default:50 (velocity units) This parameter limits the top speed of your motor. Depending on the application, you may want to limit the speed of your control to prevent accidental damage to your mechanics.
-
Page 30: I/O Input & Output Configuration
B8961 and B8962 User Manual Input & Output Configuration Your IDeal ™ Programmable Smart Drive has eight discrete optically-isolated inputs, and eight discrete optically-isolated outputs.It also supports up to eight Opto I/O modules (G4/G5 footprint),which is like having a G4PB8 board and cable built in —... - Page 31 Chapter 4 - Configuring Your System Character Function Binary Formatted Program Select BCD Formatted Program Select Clear Command Buffer Disable Keypad E, e Extend Jog, AXIS 1, axis 2 Set CL Force Z axis home input Interrupt (Run 98) J, j Jog Speed, AXIS 1, axis 2 Kill M, m...
- Page 32 B8961 and B8962 User Manual Set CL Force (F specifies axis 1, f specifies axis 2) In addition to being able to set a clamping current via the CL command,the user can also set the clamp curent on the fly based on an input.When the SET CL FORCE input is asserted during a CL defined move,the control will maintain the torque the motor is producing at that instant.
- Page 33 Chapter 4 - Configuring Your System (INT98CTRL) and (ARM INT98) are reset to default values on power-up. Note: There is a space in (ARM INT98). Jog Speed (J specifies AXIS 1, j specifies axis 2) This input works along with the Extend Jog and Retract Jog.When a jog input is activated the control checks the state of this input to determine the jog speed.If the input is OFF, the system will jog at the Jog Low speed.If it is ON it will jog at the Jog High speed.If the input is not configured the jog inputs will result in...
- Page 34 B8961 and B8962 User Manual See the SCAN setup parameter for more information on stopping program execution.See the ST command for more information on stopping moves without halting command execution. Unassigned An Unassigned input functions as a programmable input,and can be used in IF and WT statements just like any of the dedicated function inputs.
- Page 35 Chapter 4 - Configuring Your System Character Function Amplifier Fault B, b Brake over Current D, d Direction Fault H, h at Home Indexer Step (Z axis) At CL Limit Limit Error M, m Move Complete Analog Output Programmable Stall Torque Mode Unstable Z Direction...
- Page 36 B8961 and B8962 User Manual At CL Limit (K specifies axis 1, k specifies axis 2) The AT CL LIMIT output will become active when the motor current reaches the value defined by CL in the user’s program.This output allows the Servo SmartDrive...
- Page 37 Chapter 4 - Configuring Your System Order Code I/O Module Description Opto-22 Grayhill P/N (p/n) A (PCB-1210) 10-32 VAC/VDC Input G4IDC5 B (PCB-1211) TTL Input G4IDC5K C (PCB-1212) 35-60V DC Input G4IDC5G D (PCB-1213) 90-140 VAC Input G4IAC5 E (PCB-1214) 180-240 VAC Input G4IAC5A F (PCB-1215)
-
Page 38: Jog Jogging Configuration
B8961 and B8962 User Manual EDIT > SETUP > I/O > OUTSTS > ST / K Configuring Ouput States on Stop/Kill [OES] - On ST / K Output #1 - Default: NO CHANGE ßâ áà NO CHANGE This option.sets the desired states of the outputs on a Stop or Kill. -
Page 39: Home Homing Configuration
Chapter 4 - Configuring Your System EDIT SETUP JOG LO-VEL Jog Low Velocity [JL] - Axis One Jog Lo-Vel ß à O.5 in/sec Default:0.5 (Velocity Units) This option sets the low speed jog velocity used during a jog move. 1. Use ß and à keys to select an axis. 2. - Page 40 B8961 and B8962 User Manual Homing Mode Description SWITCH ONLY GH will only home to the appropriate edge of the home switch regardless of encoder mode.This is the only mode available without an encoder. SWITCH THEN Z GH will home to the switch,align to the edge and then slowly move until an encoder Z pulse is found.This mode requires an encoder.
-
Page 41: Prog Program-Run Configuration
Chapter 4 - Configuring Your System EDIT SETUP HOME FINAL Home Final Direction [HF] - Axis One Final Dir. - ß à POSITIVE Default:POSITIVE Specify the final approach direction of your Go Home (GH) move with this option. This is the direction used to search for the encoder index mark (Z channel) after the appropriate home switch edge is found. -
Page 42: Rs232 Rs-232C Configuration
B8961 and B8962 User Manual EDIT SETUP PROG DELAY Scan Delay [DY] - - - Scan Debounce: - - DELAY (ms): _ Default:100 ms The DELAY time sets the amount of time the control requires the program select inputs (BCD or Binary) to remain stable before the control will recognize and run a program.The minimum time is 1 ms.If program select inputs are not stable for a... - Page 43 Chapter 4 - Configuring Your System EDIT > SETUP > MISC > DISP < Quad #1 >Quad #2 DISP [DF] Quad #3 Quad #4 Default: Quad #1: POS1. ----Quad #1 Display ---- Quad #2:POS2 (dual axis units) á â INPUTS BLANK (single axis units) Quad #3:INPUTS Quad #4:OUTPUTS...
- Page 44 B8961 and B8962 User Manual This is usually set to the fastest controllable deceleration rate possible with mechanics in your application. 1. Use the ßà keys to select an axis. 2. Use the numeric keys to enter a stop deceleration.
-
Page 45: Tuning Your Servo System
Chapter 4 - Configuring Your System Tuning Your Servo System Your B8961 or B8962 IDeal ™ Programmable Smart Drive is a high-performance servo drive and motion controller in a single package.Your entire servo “system” includes the Smart Drive,motor and encoder.The encoder provides motor position and velocity feedback to the Smart Drive.You create a motion program using the... -
Page 46: Rs-232C Users
B8961 and B8962 User Manual Before starting the tuning procedure,it is important to have a general idea of the control loop that you will be modifying.The structure of the B8000 control loop is very simple.The loops are nested similar to a traditional analog servo system. -
Page 47: Key Pad Tuning
Chapter 4 - Configuring Your System Key Pad Tuning The Keypad tuning utilities were designed to mimic most of the capabilities of IDC’s Servo Tuner software,but in a menu structure format.The default gain parameters generally provide adequate performance.If your application requires exceptional performance,whether it be low velocity ripple, fast settling times,or no steady state position error, you will may need to modify these standard gain parameters. -
Page 48: Toggle Tuning Stimulus
B8961 and B8962 User Manual Toggle Tuning Stimulus MODE | STEP | MSEC EDIT TUNING AXIS TOGGLE 1. Pick type of toggle;Press F1 to select a velocity, position,or torque toggle. 2. Magnitude of toggle.Press F2 • Torque:% of max torque •... -
Page 49: Programming Your Application
Chapter 5 - Programming Your Application Programming Your Application The purpose of this chapter is to provide information that will help programmers begin developing applications with the SmartDrive.There are also several practical examples that can be copied and modified.Other program examples are available from the Application De veloper disk set (see DEMOS.idc). -
Page 50: Command Summary
B8961 and B8962 User Manual Command Summary The chart below lists all the IDeal commands that can be stored and executed as a part of a program.In Chapter 8, Programming with Serial Communication , there is more information on serial commands,such as Setup,Immediate Status, Supervisory Commands,and “Commands Not Available in Hosted Mode.”... -
Page 51: Variables And Arithmetic
Chapter 5 - Programming Your Application Variables and Arithmetic Variables The Smart Drive will accept a variable in a command instead of a constant. Variables may be used in: • Arithmetic • Conditional Expressions • Loop Counts • Distance and velocity commands •... -
Page 52: Built-In Variables
B8961 and B8962 User Manual Built-In Variables The following variable names are predefined in the control. They can be used throughout your programs in expressions,to set voltages,to test conditions,or even to display information on the keypad screen or some other external serial device. - Page 53 Chapter 5 - Programming Your System Examples of Built-In Variables • (PIECES)=10 Assigns 10 to variable • (SPEED)=(AI12)*(VEL SCALE) Speed = analog input times a scalar • MS21,“Enter Length”IV32,(LENGTH) Prompts user and gets feed length • VE(SPEED) Sets velocity to value in variable •...
-
Page 54: Non-Volatile Variables
B8961 and B8962 User Manual Non-Volatile Variables The non-volatile variables (EE1)-(EE20) are twenty user accessible variables that retain their values through power cycles, warm boots,and system resets.Standard user variables are reset at power down or reset.Each time one of these variables is changed (i.e.used on the left side of an equal (=) sign,the new value is written to... -
Page 55: Arithmetic Operands And Equations
Chapter 5 - Programming Your Application Arithmetic Operands and Equations The SmartDrive supports addition (+),subtraction (-), multiplication (*),and divi- sion (/).Expressions may only contain one operand.Complex equations require multiple statements. Variables and fixed point numbers may be mixed in arith- metic equations.All user arithmetic and variable storage uses 32-bit integer and fractional representation. -
Page 56: Logical Operations On Expressions
B8961 and B8962 User Manual Logical Operations on Expressions (&&,||) Conditional commands (IF,WT, LU, LW) support logical operations of AND (&&) and OR (||).Two expressions may be logically AND’d or OR’d within one condi- tional command. For example: (A)=5 (B)=2.5 IF(A)>2&&(B)=2.5 MS1, “True Statement” EB In the above program,the message “True Statement”... -
Page 57: Multi-Axis Operation
Chapter 5 - Programming Your Application Summary of Operators, Functions and Expressions Name Program Name Variable && Logical AND Logical OR Logical NOT Not Equal Subtract Multiply Divide Equal > Greater Than < Less Than >= Greater Than or Equal to <= Less Than or Equal to &... - Page 58 B8961 and B8962 User Manual AC2,5 Set acceleration of both axes VE10,3 Set velocity of both DI9,-3.1 Set distance of each axis Start both together Moves only axis 1 because the last D command only had a parameter for axis 1...
- Page 59 Chapter 5 - Programming Your Application The last move parameters used to define a move profile are saved.This saves pro- gram space in applications where sections of code repeat the same moves.The DI or DA command is the only motion parameter that needs to be repeated.A stair- step pattern is one example of this.
-
Page 60: Typical Programming Examples
B8961 and B8962 User Manual Typical Programming Examples The following program examples will show how the IDeal command language can be used to perform simple tasks.There are more extensive and elaborate example programs in the DEMOS.idc file that came with your Application Developer disk set. -
Page 61: Reading An Analog Input
Chapter 5 - Programming Your Application Turning On an Output on-the-fly AC.05 Set acceleration VE10 Set velocity Set total move distance Set point to turn on... Output 1 Set point to turn on... OT2,1 Output 2 Set point to turn on... OT3,1 Output 3 To input a 4 Digit BCD number reading 2 Digits at a time... -
Page 62: Configuring An Analog Output
B8961 and B8962 User Manual Configuring an Analog Output The analog outputs of SmartDrives are 12-bit outputs.The value of the analog out- put is scaled to this 12-bit (0-4095) resolution.If you have a 4-20 mA output you will have an output resolution of .004 mA. -
Page 63: Programming Commands
Chapter 6 - Programming Commands Programming Commands This chapter defines,in alphabetical order, all of IDC’s IDeal ™ commands that can be used in a program.Please refer to Chapter 4, Using the K eypad, for more infor- mation on entering these commands with the keypad. Some IDeal commands are supported only in serial communication mode.These commands are listed and defined in Chapter 8, Programming with Serial Communication , and they can also be found in the Summary of Commands... - Page 64 B8961 and B8962 User Manual Summary of IDeal ™ Commands Command Description Acceleration Break Distance Absolute Distance to a Change Deceleration Distance Incremental Enable Amplifier End of Block End of Routine Function Key Go Home Go Immediate Go (Start a Move)
- Page 65 Chapter 6 - IDeal Command Reference ™ Acceleration syntax - ACr,r sec,rps 2 or unit/s 2 Units: (selected from the EDIT > SETUP > MECH menu) Range: unit scaling dependent Default: AC sets the acceleration and deceleration ramp on all velocity changes.The deceler- ation value (DE) will be the same as the acceleration value unless it is specifically set after the AC command.The value of DE must be reset every time AC is changed.
- Page 66 B8961 and B8962 User Manual Distance Absolute syntax - DA±r, ±r Units: selected from the EDIT > SETUP > MECH menu Range: unit scaling dependent Default: DA sets the next move position, referenced from absolute zero.The absolute zero position is established after a Go Home move (GH) and/or with the Set Position (SP) command.Absolute positioning is typically used in applications where you are...
- Page 67 Chapter 6 - IDeal Command Reference ™ Where n is the current DC command distance (n=19 in this example), n-1 is the previous DC command distance (e.g.10), V is the velocity, and t is acceleration time (for the first DC specified in a move profile, n-1 would correspond to the beginning of the move).
- Page 68 B8961 and B8962 User Manual Deceleration syntax - DEr,r sec,rps 2 or unit/s 2 Units: Range: unit scaling dependent Default: Sets the deceleration ramp on all negative velocity changes. The deceleration value will be the same as the acceleration value unless a deceleration is specified.The value set will be used on subsequent moves unless it is re-specified by either an acceleration (AC) or deceleration (DE) command.
- Page 69 Chapter 6 - IDeal Command Reference ™ End of Block syntax - EB Units: Range: Default: The EB command designates the End of a Block of loop or IF commands.Every LP, LW, LU, and IF statement must have an EB associated with it. Examples: LP2 DI3 GO EB Performs the move twice...
- Page 70 B8961 and B8962 User Manual See the illustration below for the value of (FKEY) returned for each key: The following example shows how to use the keypad function keys as an operator interface: 1. Write a menu messa ge (MS) on the keypad display above the corresponding function keys.
- Page 71 Chapter 6 - IDeal Command Reference ™ Program 17: [SCREEN 3] MS21,”Part G Part H Part J” Writes a message above function keys. FK1,2,3,17,18 Wait for selected key press IF(FKEY)=17 GT[SCREEN 2] EB If Up arrow goto screen 2 IF(FKEY)=18 GT[SCREEN 1] EB If Down arrow goto screen 1 (FKEY)=(FKEY)+6 Add offset to FKEY variable to goto correct part subroutine...
- Page 72 B8961 and B8962 User Manual er pulse is not seen within one motor revolution after the reference edge of the switch is seen,the final homing routine will be aborted. Note: Homing Mode directly affects or reconfigures the function of the GH com- mand (see “Configuring Your Home Parameters”in Chapter 5).
- Page 73 Chapter 6 - IDeal Command Reference ™ The GI command can cause program execution and moves to be asynchronous.In order to re-synchronize the end of a GI move with program execution,use the Wait (WT) command and its new syntax,i.e.WT#1 will wait for only axis #1. If a program error occurs during a GI move,the move will stop at the Stop Decel Rate.
- Page 74 B8961 and B8962 User Manual D. Another issue is programming conditional GI moves within IF blocks, for exam- ple: LP IF1,1 VE5 DI20 GI OTXX100 EB IF2,1 MC,+ VE,10 GO EB IF3,1 VE,0 GO EB EB In this program,when input #1 is asserted,the GI move will be commanded,how- ever, since the program will continue executing,input #1 may still be asserted on the next loop iteration.This will cause a second GI move to be commanded which...
- Page 75 Chapter 6 - IDeal Command Reference ™ G. (VAR1)=10 {Initialize Variable} {Beginning of Loop Block} DI55,10 {Define Two Axis Move} VE10,10 AC.5,.5 {Start Go Immediate Move Both Axes} MS1,’’’’ {Clear Screen} MS1,(AI9) {Write Analog Input 9 to the Screen While Moving} WT,#2 {Wait for Axis 2 to Stop Moving}...
- Page 76 B8961 and B8962 User Manual Go (Start a Move) syntax - GO or GOi,i Units: Range: i = 1-16 Default: GO executes a move profile defined by some combination of AC,VE,DE,DI, DA, DC,or MC commands. Actual motion of a new profile will occur after a short cal- culation of the motion trajector y.
- Page 77 Chapter 6 - IDeal Command Reference ™ which corresponds to the appropriate X and Y coordinates. The following program would execute the move in the illustration above: VE2 AC.1 DA4,2 GP The path velocity is 2 user units/sec,path acceleration is 0.1 sec.,and the X,Y posi- tion would be (4,2).
- Page 78 B8961 and B8962 User Manual Go to Program syntax - GTi or GT[name] Units: Range: i = 1-199 (1-400 with 30K memory option),[name] = any legal program name Default: GT branches to the program number or name specified.All subsequent commands in the calling program are ignored.
- Page 79 Chapter 6 - IDeal Command Reference ™ Example: IF14,1 GO EB If input 14 equals 1 Go IF12,010 GO EB If inputs 12-14 equal 010 Go IF110 GO OT3,1 EB If inputs 1-3 equal 110 Go and turn on Output #3 IF(A19)<5500 OT11 GO EB If analog input 9 is less than 5500,turn on output 1 and 2,then GO...
- Page 80 B8961 and B8962 User Manual Loop syntax - LPi Units: R a n ge : n / a D e fa u l t : LP will cause all commands between LP and EB to be repeated “ i ”t i m e s . If LP is fo l- l owed by a 0 or no nu m b e r, the loop will repeat continu o u s ly.
- Page 81 Chapter 6 - IDeal Command Reference ™ Example #2: (A)=10 LU(A)<20 DI10 GO EB In this example,the loop is executed once since the (A)<20 condition is true on the first iteration. Example #3: LUXX1X1 MS1,”Inputs 3 & 5 are off” EB GT[Inputs On] In this example,the loop will continue to execute as long as inputs #3 and #5 are off.
- Page 82 B8961 and B8962 User Manual Move Continuous syntax - MC+,+ Units: R a n ge : n / a D e fa u l t : n / a MC sets move pro files to “ c o n t i nuous move ” , utilizing AC and VE para m e t e rs .M ove C o n t i nuous is enabled on an axis with the “...
- Page 83 Chapter 6 - IDeal Command Reference ™ Example 1: Basic Move Continuous syntax. D e m o n s t rates how to ch a n ge speed and stop MC moves based on time delays and input conditions. E n able Move Continuous on axis 1 AC.1 Set the acceleration ra t e V E 5 0...
- Page 84 B8961 and B8962 User Manual [ Joy s t i ck ] Main Pro gra m , X=Axis 1,Y=Axis 2 GS[Get Speeds] Call a routine that scales the analog input vo l t age to X and Y speeds MC+,+ AC . 2 , . 2...
- Page 85 Chapter 6 - IDeal Command Reference ™ Message to Display syntax - see below Units: R a n ge : n = 1-40 display position in ch a ra c t e rs ;C h a ra c t e rs 1-20 on top line, 21-40 on the bottom display line.
- Page 86 B8961 and B8962 User Manual ON Command (On Event) syntax - ONn, GTx, ONn, GSx, ONn,0 Units: Range: Default: The ON command allows the user to define conditional program execution based on the occurrence of a certain event.When the programmable event occurs,the current program and move are interrupted and program execution begins at the predefined interrupt program.The interrupt program can be defined as a GT or a...
- Page 87 Chapter 6 - IDeal Command Reference ™ Output syntax - see below Units: Range: i = starting output number, 1-16 x = 0;output high (OFF) x = 1;output low (ON) x = anything but a 1 or 0 ; the state of the output remains unchanged Default: Syntax:...
- Page 88 B8961 and B8962 User Manual In the program above,assume the input was an optical sensor which triggered on a registration mark at a position of 4 user-units.The figure below shows the com- manded move related to the registration move. Accompanying the programmable Registration Command is the configurable Registration Input:G (also G in Serial Setup Commands).To configure a...
- Page 89 Chapter 6 - IDeal Command Reference ™ Set Position syntax - SPn,n Units: selected in EDIT > SETUP > MECH menu R a n ge : va ries based upon Distance Units D e fa u l t : SP sets the current absolute position to “ n ” .This command is typically used to readjust or shift a coordinate system.
- Page 90 B8961 and B8962 User Manual Stop On Input syntax - STn,n or ST#n,#n Units: n / a R a n ge : 0-16 (Inputs) # 1 , #2 (Axe s ) D e fa u l t : n / a S y n t a x e s: ST stops move execution upon activating the input specified by n.
- Page 91 Chapter 6 - IDeal Command Reference ™ Velocity syntax - VEr,r Units: selected from the EDIT > SETUP > MECH menu R a n ge : .002 - 50 rps. R a n ge is scaled to velocity units D e fa u l t : 1 motor rev per sec (rps) VE sets the maximum velocity during a move pro fi l e .
- Page 92 B8961 and B8962 User Manual Summary of Operators, Functions and Expressions Name Program Name Variable && Logical AND Logical OR Logical NOT Not Equal Subtract Multiply Divide Equal > Greater Than < Less Than >= Greater Than or Equal to <=...
-
Page 93: Programming With Serial Communication
Chapter 7 - Programming with Serial Communication Programming with Serial Communication Overview Any RS-232C terminal,PC,computer serial RS-232C card,or RS-232C-equipped PLC can be used to configure,program,and operate IDC’s SmartDrive controls.IDC p rovides and stro n g ly recommends using our Wi n d ows-based Application Dev e l o p e r for configuration and programming.If you choose not to use this tool,all of the IDeal ™... -
Page 94: Daisy Chaining Smartdrives
B8961 and B8962 User Manual Troubleshooting Serial Communication Problems If communications between computer and Smart D ri ve are unsuccessful, one or more of the fo l l owing pro c e d u res will usually solve the pro bl e m : 1. -
Page 95: Section 2:Application Developer Software
Chapter 7 - Programming with Serial Communication Rules for Daisy Chain Operation 1. Units on a daisy chain must be “device addressed’(numbered) in ascending order away from the host device/controller in order for the Load All (LA - EX) commands to work properly.The unit addresses are not required to be numeri- cally sequential,but must be in ascending order. -
Page 96: Common Installation Errors And Remedies
B8961 and B8962 User Manual Common Installation Errors and Remedies There are no known installation problems with Application Developer. Please call the IDC Applications Department at ( 8 1 5 - 2 2 6 - 2 2 2 2).if you need assistance... -
Page 97: Section 3:Using Application Developer
Chapter 7 - Programming with Serial Communication Section 3: Using Application Developer Application De veloper’s graphical environment helps you setup and program your SmartDrive from your computer. It guides you through configuring your control, following the same steps and menus as the keypad configuration.Complete details on setup menus and choices can be found in Chapter 5 - Configuring Your System . - Page 98 2. Select the product you are configuring, S6962 in this case,and click on the Next button. Note:an a B8962 will be configured in this example of using the Project Wizard.If you are configuring an B8961, you will only be configuring one axis.
- Page 99 Chapter 7 - Programming with Serial Communication 3. Click on the Next button and the Motor setup window will appear. 4. Select the motor and AC voltage that will be used,and select Next. 5. Click Next and you will be in the Mechanics setup window. Mechanical System setup is particulary easy if you are using IDC systems.
-
Page 100: Setup Wizar D
B8961 and B8962 User Manual 7. Select your preferences from the pulldown menus and click on Next. 8. When all axes have been configured,the following window will appear.This display gives you the opportunity to review the settings you have made for each axis, and to return (using the Back button) to any parameter you may wish to change at this time. -
Page 101: Axis Setup
Chapter 7 - Programming with Serial Communication tons as shown here: Axis Setup Click on the Axis Setup button. The first menu to appear will be the Motor menu,as shown below: Note: please refer to Chapter 5 for detailed descriptions of setup parameters. Axis # Each axis of your system must be configured separately. - Page 102 B8961 and B8962 User Manual selected in the Motor menu. Encoder Menu The encoder will already be defined based on the motor selected.The mode is fixed to Servo-Closed Loop.The Resolution and Mode cannot be changed.All others will have defaults,and shouldn’t be changed unless using tuning software.
- Page 103 Chapter 7 - Programming with Serial Communication units convenient for your application.This menu also allows you to set a maximum allowable speed and acceleration for each axis.If programming in steps, gear ratio will be fixed 1:1.If programming in revolutions, revs/sec is in terms of the output revs (using the Distance Ratio as the gear ratio);rps is in terms of the motor revs.
-
Page 104: I/O Setup
B8961 and B8962 User Manual customized homing routine with the ease of use of calling a “canned”program.Also see the GH command in the IDeal Command Reference chapter for more details on homing. Tuning Menu The tuning gains can quickly be changed in this menu.Default gains are input based on the motor selected.It is not recommended to change these values unless... -
Page 105: Miscellaneous (Misc) Setup
Chapter 7 - Programming with Serial Communication Miscellaneous (Misc) Setup Click on the Misc (Miscellaneous) button. Misc Setup contains three configuration categories that include options available in the PROGRAM SETUP and RS-232C SETUP menus detailed in Chapter 5. Diagnostic Display Format Allows default display to be changed to position, velocity, blank,current,inputs,out- puts,OPTOs,status (axis or system) or user defined text. -
Page 106: File Menu
B8961 and B8962 User Manual Stop Scanning Program Select Lines After... Allows you to select the conditions under which program select input scanning stops.Scanning will resume upon cycling power, sending serial reset command or asserting a Warm Boot defined input. -
Page 107: Program Editor
Smart D ri ve Total pro gram length, not including comments, i s limited to 1024 by t e s .Total file length without comments is 8k for B8961 or B8962, or 30k for B8961-30k or B8962-30k (expanded memory option).The Send button will send the viewed pro gram (only one viewed) to the dri ve . -
Page 108: View Configuration
B8961 and B8962 User Manual View Configuration Click on the View Configuration button at any time to see your system configura- tion status.All configuration parameters are listed and may be viewed by scrolling the list. I/O and Status Drive and input/output/opto status can be displayed by selecting View Status. -
Page 109: Run Menu
Chapter 7 - Programming with Serial Communication Retrieve All Use Retrieve All to upload the entire contents of a SmartDrive control to a new file that can then be edited,downloaded to another SmartDrive,or saved to a PC file for documentation purposes.This file contains the complete contents of the SmartDrive including all the programs defined,I/O definition,and mechanical scaling parameters. -
Page 110: Section 4:Rs-232C Ideal Command Reference
To fa m i l i a rize yo u rself with I D e a l RS-232C commands, rev i ew the fo l l owing ex a m p l e of a typical file created in Application De veloper for download to a B8962. You will need to generate a similar file to configure your SmartDrive.Individual programs... - Page 111 Chapter 7 - Programming with Serial Communication...
-
Page 112: Command Syntax
B8961 and B8962 User Manual Sample configuration file continued: Command Syntax All IDeal™ commands use two letter UPPER CASE ASCII characters. Command delimiters can be a carriage return (<cr>) or space (<sp>) character. The commands that follow define IDC’s command syntax. A brief command description is given here,but the full command definition is found in Chapter 5. - Page 113 Chapter 7 - Programming with Serial Communication Letter or Symbol Description <n> Unit address number is optional with RS-232C, and the command is sent to all units if no address is specified. All Status commands require an address. Example: <n>AUi,i Field separator.
-
Page 114: Serial Setup Commands
B8961 and B8962 User Manual Serial Setup Commands These are the commands that the Application Developer program uses to configure the SmartDrive according to the choice made in the SETUP dialog boxes. Command Command Description and Application Examples Syntax Anti Hunt <n>AHi,i... - Page 115 Chapter 7 - Programming with Serial Communication Serial Setup Commands These are the commands that the Application Developer program uses to configure the SmartDrive according to the choice made in the SETUP dialog boxes. Command Command Description and Application Examples Syntax Scan Delay <n>DYi...
- Page 116 B8961 and B8962 User Manual Serial Setup Commands These are the commands that the Application Developer program uses to configure the SmartDrive according to the choice made in the SETUP dialog boxes. Command Command Description and Application Examples Syntax Home Offset <n>HO±r,...
- Page 117 Chapter 7 - Programming with Serial Communication Serial Setup Commands These are the commands that the Application Developer program uses to configure the SmartDrive according to the choice made in the SETUP dialog boxes. Command Command Description and Application Examples Syntax Motor Direction Reference <n>MDi,i...
- Page 118 B8961 and B8962 User Manual Serial Setup Commands These are the commands that the Application Developer program uses to configure the SmartDrive according to the choice made in the SETUP dialog boxes. Command Command Description and Application Examples Syntax Ouput States on Event <n>OEa,iii...
- Page 119 Chapter 7 - Programming with Serial Communication Serial Setup Commands These are the commands that the Application Developer program uses to configure the SmartDrive according to the choice made in the SETUP dialog boxes. Command Command Description and Application Examples Syntax Scan Conditions <n>SNiiiiii...
-
Page 120: Serial Programming Commands
B8961 and B8962 User Manual Serial Programming Commands The commands in this category may be sent to the SmartDrive’s buffer and executed on a first-in first-out (FIFO) basis. This execution does not require you to create or download any program to the SmartDrive’s volatile memory. See Chapter 6, Programming Commands for complete definitions. - Page 121 Chapter 7 - Programming with Serial Communication Serial Programming Commands The commands in this category may be sent to the SmartDrive’s buffer and executed on a first- in first-out (FIFO) basis. This execution does not require you to create or download any pro- gram to the SmartDrive’s volatile memory.
-
Page 122: Serial Immediate Status Commands
B8961 and B8962 User Manual Commands Not Available In Hosted Mode The following set of commands can only be executed if they are part of, or within, a program: Command Command Name Break End Block Go Sub Go To Input Variable... - Page 123 Chapter 7 - Programming with Serial Communication explain what the SmartDrive is doing.If a fault is indicated,the Drive and Axis Status commands can give detailed,axis specific information. Summary of Immediate Status Commands Command Syntax Purpose Clear Command Buffer <n>CB Clears the terminal input buffer and buffered command buffer Input States <n>IS...
- Page 124 B8961 and B8962 User Manual Serial Immediate Status Commands Note: All but the S and K commands require an address. Command Command Description and Application Examples Syntax Clear Command Buffer <n>CB Clears the terminal input buffer and buffered com- mand buffer Tell Input States <n>IS...
- Page 125 Chapter 7 - Programming with Serial Communication Serial Immediate Status Commands Note: All but the S and K commands require an address. Command Command Description and Application Examples Syntax Tell Output States <n>IS Returns the current state (on or off) of the 8 inputs. The status is returned as a four digit hexadecimal number, preceded by an asterisk.
- Page 126 B8961 and B8962 User Manual Serial Immediate Status Commands Note: All but the S and K commands require an address. Command Command Description and Application Examples Syntax Tell Axis Status <n>SA1 Returns the current axis status as a four digit hexadecimal number, preceded by an asterisk.
- Page 127 Chapter 7 - Programming with Serial Communication Serial Immediate Status Commands Note: All but the S and K commands require an address. Command Command Description and Application Examples Syntax <n>SD1 Tell Drive Status Returns the current drive status as a four digit hexadecimal number, pre- ceded by an asterisk.
- Page 128 B8961 and B8962 User Manual Serial Immediate Status Commands Note: All but the S and K commands require an address. Command Command Description and Application Examples Syntax <n>SS Tell System Status Returns the current system status as a four-digit hexadecimal number, pre- ceded by an asterisk.
-
Page 129: Serial Supervisory Commands
Chapter 7 - Programming with Serial Communication Serial Supervisory Commands The following commands control program uploading, downloading, deleting, execution, etc. All of these commands are fully defined in this section. Command Command Description and Application Examples Syntax Auto Address <n>AA or The AA command automatically addresses SmartDrive units in a daisy chain. - Page 130 B8961 and B8962 User Manual Serial Supervisory Commands The following commands control program uploading, downloading, deleting, execution, etc. All of these commands are fully defined in this section. Command Command Description and Application Examples Syntax RS-232C Echo Enable/Disable <n>ECi 0 = echo Disabled, 1 = echo Enabled.
- Page 131 Chapter 7 - Programming with Serial Communication Serial Supervisory Commands The following commands control program uploading, downloading, deleting, execution, etc. All of these commands are fully defined in this section. Command Command Description and Application Examples Syntax Run Program <n>RNi This commands any program, by number only.
- Page 132 B8961 and B8962 User Manual...
-
Page 133: Hardware Reference
MINIMUM WIDTH OUNTING MINIMUM DEPTH OUNTING The B8961 and B8962 depend on air flow for cooling.In all but the least demanding applications,the following mounting guidelines should be observed: • Allow clearance (approximately one inch) for a -FK1 or FK2 fan kit if the available airflow appears marginal.The fan kit adds 1.05 in to the depth of the B896n if mounted in the... -
Page 134: Fk1 And Fk2 Fan Kit
B8961 and B8962 User Manual FK1 and FK2 Fan Kit The FK1 and FK2 Fan Kit Option may be necessary if air flow across the B896n heat sink is extremely poor, or if the ambient temperature is excessive.The FK1 and the FK2 are the 110VAC and 220VAC versions of IDC’s fan kit.They can be ordered individually for drive mounting in the field,or ordered as part of a system (i.e.B8961-FK2) for factory mounting.Since the B896n supplies power to the fan... -
Page 135: B8000 Smart Drive Hardware Specifications
9 0 - 2 3 0 VAC , single phase, 5 0 / 6 0 H z 1 1 5 0 VA @ 115VAC ,2 3 0 0 VA @ 230VAC for the B8961 2 3 0 0 VA @ 115VAC ,4 6 0 0 VA @ 230VAC for the B8962 Motor Output C u rre n t : 5 amps continu o u s , 10 amps peak P ro t e c t i o n :P rotected against phase to phase short s ,s h o rts to gro u n d .I n t e rn a l ly fused. -
Page 136: B8961 And B8962 Hardware Connections
B8961 and B8962 User Manual B8961 and B8962 Hard w a re Connections... -
Page 137: B8961 And B8962 Input And Output Schematics
Chapter 8 - Hardware Reference B8961 and B8962 Input and Output Schematics... - Page 138 B8961 and B8962 User Manual Connecting IDC Limit Switches to the B8961/2...
-
Page 139: Trouble Shooting
Trouble Shooting Trouble Shooting Most problems encountered during the startup and operation of a B8000 Series Smart Drive can be traced to a few basic causes such as mechanical problems, incorrect or noisy signal wiring,attempting to operate beyond the system’s capabilities,or software setup or programming errors.A combination of these underlying problems can present an overwhelming variety of symptoms that make it very difficult to track down the root cause of the difficulties. - Page 140 B8961 and B8962 User Manual Symptoms Probable Causes Possible Remedies RMS Shutdow n Mechanical jam,amplifier shut down to Check for binding or reduce prevent motor overheating. acceleration and duty cycle. Vertical or constant force application Contact IDC’s application dept. causing false RMS fault.(DSP V1.6 only) Load correct file via Servo Tuner.
-
Page 141: Idc Product Support
2. Prepare a purchase order for possible repair cost,in the event that the unit is not warranted. 3 . Contact your IDC distributor or Danaher Motion (707)586-1473 for an RMA#. 4. Provide the information describing the nature of the failure.The better the information,the faster we’ll have your problem resolved. -
Page 142: Index
B8961 and B8962 User Manual Index Homing setup,37 AC Power, 133 Opto confi g u ra t i o n ,3 2 switch,37 amplifier Opto I/O, 2 8 communication,106 Output Confi g u ra t i o n ,3 2... - Page 143 Index S c a l i n g ,2 4 Te s t va ri able count (max.), 4 9 a c c e l e ra t i o n ,2 7 m ove ,1 2 va ri abl e s ,4 9 d i s t a n c e ,2 4 ,2 5 o u t p u t ,1 2 ve l o c i t y, 2 6...
-
Page 144: Appendix A: Idc Actuator Ratios
B8961 and B8962 User Manual Appendix A: IDC Actuator Ratios Configuring inch & mm Units on Smart Drives Used With IDC Actuators One of the first steps in setting up an IDC Smart Drive with an IDC linear actuator is to configure the distance, velocity, and acceleration to use meaningful units, probably inches or millimeter s.This is done via the RATIO (GR) command.The... -
Page 145: Idc Actuator Ratios
Appendix A: IDC Actuator Ratios IDC Actuator Ratios N, T, R2, R3, R4, NM, RM Series N Series Smart Drive Mechanical Ratio Setting [EDIT]-[SETUP]-[MECH]-[RATIO] menu Motor Screw Overall Ratio R e d u c t i o n Pitch (Mtr Tu rn s / I n c h ) Ratio for Inches Ratio for mm N-992... - Page 146 B8961 and B8962 User Manual T Series Smart Drive Mechanical Ratio Setting [EDIT]-[SETUP]-[MECH]-[RATIO] menu Motor Screw Overall Ratio R e d u c t i o n Pitch (Mtr Tu rn s / I n c h ) Ratio for Inches...
- Page 147 Appendix A: IDC Actuator Ratios R3 Series Smart Drive Mechanical Ratio Setting [EDIT]-[SETUP]-[MECH]-[RATIO] menu Motor Screw Overall Ratio R e d u c t i o n Pitch (Mtr Tu rn s / I n c h ) Ratio for Inches Ratio for mm R3-10T 0 .
- Page 148 B8961 and B8962 User Manual NM / RM Smart Drive Mechanical Ratio Setting [EDIT]-[SETUP]-[MECH]-[RATIO] menu Motor Screw Overall Ratio R e d u c t i o n Pitch (Mtr Tu rn s / I n c h ) Ratio for Inches...
-
Page 149: Appendix B: Emc Installation
OEMs,machine builders,and end users successfully install and operate IDC’s single and dual axis servo drives and controls (Models:B8961 and B8962) in compliance with these EMC regulations. There are two components to Electromagnetic Compatibility.The first,that an electrical device not disturb the operation of other electrical devices,is covered by limits on the power levels of both emitted and conducted electrical magnetic noise.The second component,the ability to operate in the presence of... -
Page 150: Separation And Shielding
B8961 and B8962 User Manual methods used.There are only a few things a machine designer can do to minimize the chance of EMC conflicts between sub-systems in his final product,and between his final product and other products.The first is to use products and com- ponents that have a sufficient level of EM immunity to assure that their operation will not be affected by other equipment.In some cases,such as sensitive measuring... -
Page 151: Grounding
Appendix B: EMC Installation Another source of the “black magic” reputation of electrical noise abatement comes from the area of cable shielding.There are two objectives to cable shielding.The first is to shield the signals in the cable from outside interference.Traditionally, protecting sensitive,low voltage signals,such as encoder and resolver feedback signals,from corruption has been the main focus of industrial cable shielding. -
Page 152: Physical Installation
B8961 and B8962 User Manual Physical Installation The drawing at right shows an example of an EMC compliant IDC servo Smart Drive installation.It is assumed that the AC line filter and the Smart Drive have a good RF ground connection to the cabinet frame,and that the cables are shielded and grounded at both ends. -
Page 153: Motor Output Power Cable Shielding
Appendix B: EMC Installation IDC has tested and documented the effectiveness of the Corcom EMI filters (part #: 6EQ8 F7264) but any filter with a similar power and high frequency impedance characteristics should provide similar results. The proper installation of the line filter is at least as important as properly sizing it to the application.The following guidelines should be used: 1. -
Page 154: Declaration Of Confromity
B8961 and B8962 User Manual DECLARATION OF CONFORMITY For declaration of conformity, please contact the factor y (1-800-227-1066 or 1 - 6 0 3 - 8 9 3 - 0 5 8 8 ) . -
Page 155: Appendix C: Fan Kit Option
Appendix C: Fan Kit Option Appendix C: Fan Kit Option IDC controls are designed for convection cooling.The shape and size of our heatsinks are the result of thermal analysis and experimentation. All of our controls have built-in temperature protection.Thermal sensors inside the B8000 controls will activate at a conservative heatsink temperature of 55°C.Thus, IDC controls will not be damaged when overtemperature conditions occur. - Page 156 B8961 and B8962 User Manual...
-
Page 157: Appendix D: Regen Pack Option
Appendix D: Regen Pack Option Appendix D: Regen Pack Option When a large inertial load is decelerated or a ve rtical load is lowe re d , the mech a n i c a l e n e rgy that is not dissipated as heat in the actuator or drive is “regenerated” by the motor and transferred back into the drive’s power supply.This causes the drive’s power supply voltage to increase. - Page 158 Danaher Motion E-mail: customer.support@danahermotion.com World Wide Web: http://www.idcmotion.com 4301 Kishwaukee Street, Rockford, IL 61109 (815) 226-2222 • FAX (815) 226-3080 B8961/B8962 Operator’s Manual, PCW-4744 Rev.1.9 July 2003...